安全で快適な空間づくりのために
駅や空港などの公共機関やスタジアムなどのイベント会場では、不特定多数の人々が集まるため、事故を予防し、往来をできるだけスムーズにする必要があります。そのためには、適切な群集制御によって混雑を抑制し、人々の安全性と快適性を確保することが重要です。
群集制御を実施する際には、片側通行や立入禁止などの動線制御に加え、時間経過や混雑度合いに応じて規制を強化・緩和したり、制御違反者や体調不良者に対応したりするなど、状況に応じた制御の切り替えを事前に計画しておく必要があります。近年、群集制御の計画を工学的に設計・最適化するために活用されているのが群集シミュレーションです。群集シミュレーションによって、混雑度合いや潜在的なリスクなどの評価指標を事前に計算し、計画立案に活かすことができます。
本研究の目的は、群集シミュレーションを活用した、より効果的な群集制御計画の立案です。そのために、群集制御と制御に対する群集の行動選択の数理モデル化を研究しています。
ポイントは制御の強制力と個人の遵守度
群集が制御に対してどのように行動するかは、「制御の強制力」と「個人の遵守度」という2つの要素に影響されます。
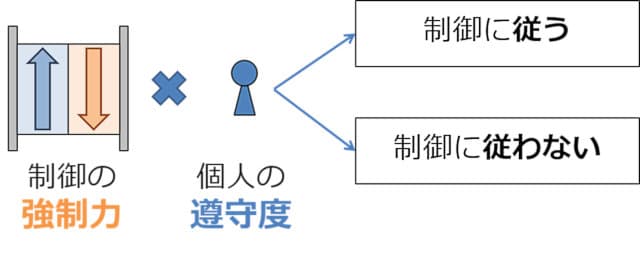
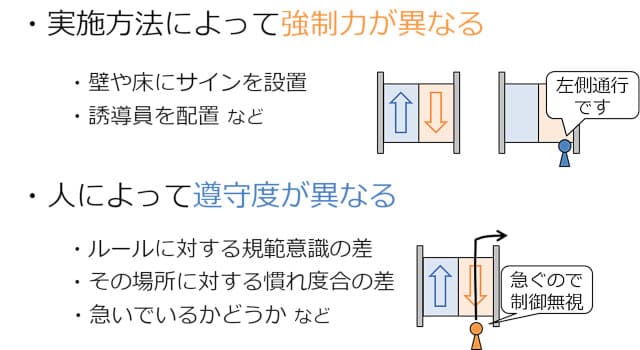
制御の強制力は、制御方法によって群集が実際に制御通りに行動する確率を表すパラメータです。例えば、駅構内の通路や階段で片側通行を制御する場合、壁や床のサインで知らせる方法と、誘導員が立って規制する方法では、群集の応じる割合が異なります。強制力パラメータを変えた際の混雑度や退場時間をシミュレーションすることで、安全性や快適性を確保するために必要な強制力の程度を事前に検討できます。
個人の遵守度は、歩行者一人ひとりの制御しやすさを表すパラメータです。たとえば、平時の通勤・通学中の群集と、イベント後の熱狂している群集では、制御のしやすさが異なる可能性があります。また同じ施設でも、何度も来場したことのある人が多数の場合と、初めて来場する人が多い場合では、群集の遵守度合いが異なるでしょう。遵守度パラメータをシミュレーション対象に応じて変更することで、群集属性に応じた最適な制御を計画できます。
シミュレーション実施例
下の図は、分岐路における誘導制御のシミュレーションの例です。これは、イベント会場から観客が出口に向かう状況を想定しています。各歩行者はスタート地点Sから出発し、出口Aまたは出口Bを目指します。出口Aへ向かう下経路は、移動距離は短いですが道幅が狭く混雑する危険性があります。一方、出口Bへ向かう上経路は、道幅が広いですが移動距離が長くなっています。
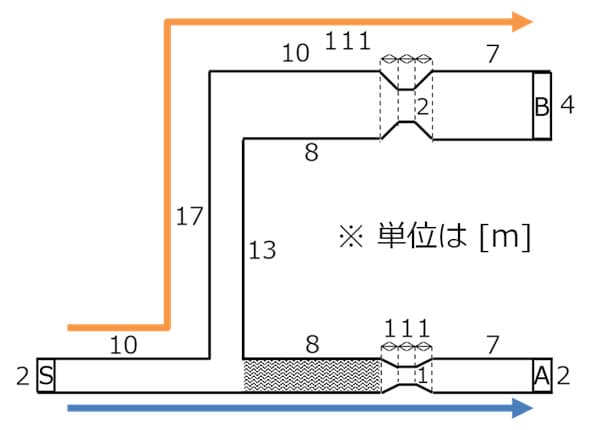
はじめ、各歩行者は移動距離が短い出口Aを目指して下経路を選ぶとします。しかし、下経路は道幅が狭いため次第に混雑が生じ、移動に時間がかかるようになります。そこで、あい路(幅の狭い通路)の前(図1網掛部)の密度をモニタリングし、この密度が事前に設定したしきい値を超えたとき、出口Bへ迂回するような制御を開始します。各歩行者は、迂回制御の強制力と自身の遵守度に応じて、制御に従って出口Bへ迂回するか、制御に従わず出口Aまで直進するかを選択します。
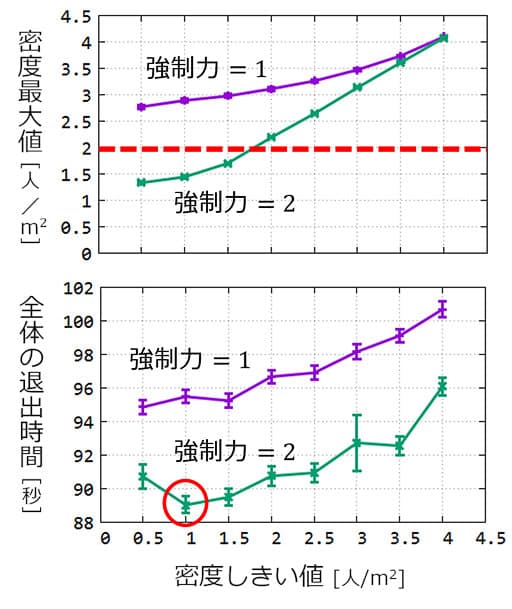
迂回制御の開始タイミングを決める密度しきい値と、強制力パラメータの大きさとを様々に変えながらシミュレーションを行い、全体の退出時間や密度最大値などの指標を測定することで、どのような制御を行うべきか検討することができます。図2は、総歩行者数200 [人]・出現頻度 4 [人/秒] の場合のシミュレーション結果です。安全性・快適性の指標として、例えば密度最大値を 2 [人/m2] 以下に抑えた上で、なるべく全体退出時間を短くしようと思うと、制御を開始する密度しきい値が1.0 [人/m2] かつ強制力パラメータ値が2 のとき、この目標を達成できると予測されます。
実際の制御計画立案時には、時間経過や入退場する歩行者流の増減など、局所的な密度以外の制御切り替え条件の他、工事費や人件費など制御を実施するコストといった多様な要素を踏まえた検討が行われます。また、平時のシミュレーションだけでなく、地震や火災のような災害、または傷病者や体調不良者の発生などの非常イベントも制御切り替え条件にできます。群集シミュレーションを活用することで、経験則のみに頼ることなく、工学的に制御計画を設計できると期待されています。
※ 本研究は、JST、未来社会創造事業、JPMJMI20D1の支援を受けたものです。
受賞歴・発表文献
- 論文Miyano, S. (2026). Effectiveness of crowd-guidance media: comparison of non-immersive virtual reality and field experiments. Acta Polytechnica CTU Proceedings, 57, 246-253, Paper:doi: 10.14311.
- 論文Shuhei Miyano, Hyerin Kim and Tetsuya Aikoh, Guidance effectiveness of combined crowd-control media, EPJ Web of Conference, Vol.334 (2025), Traffic and Granular Flow 2024 (TGF’24), Art. no. 04006, pp. 13, Paper:doi: 10.1051
- 論文 未来社会創造事業成果集 2024「人の流れを制御して群集事故を未然に防ぐ」
- 論文 Masako Inoue, Kazutaka Kimura, and Atsushi Yamauchi, SBAA: Simulation-Based Agile Approach to Crowd Control Planning, Journal of Disaster Research, Vol.19 (2024), No.2(Apr), Special Issue on Crowd Management and its Applications, pp. 256-267, Paper:doi: 10.20965/jdr.2024.p0256
- 論文 Shuhei Miyano, Using Virtual Reality to Study the Effectiveness of Crowd Control Medium and Information, Journal of Disaster Research, Vol.19 (2024), No.2 (Apr), Special Issue on Crowd Management and its Applications, pp. 293-302, Paper:doi: 10.20965/jdr.2024.p0293
- 発表宮野修平,“群集シミュレーションによる動的な制御計画の評価,” 情報処理学会 第83回全国大会, 2021
関連特許
- 特許特許7606875,「シミュレーター、シミュレーション方法及びシミュレーションプログラム」
- 特許特許7594924,「シミュレーター、シミュレーション方法及びシミュレーションプログラム」
- 特許特許7492840,「シミュレータ、シミュレーション方法及びシミュレーションプログラム」
- 特許特許7457536,「シミュレータ、シミュレーション方法及びシミュレーションプログラム」
- 特許特許7441080,「シミュレータ、シミュレーション方法及びシミュレーションプログラム」
- 特許特許7060460,「シミュレーター、シミュレーション方法及びシミュレーションプログラム」
- 特許特許7074580,「シミュレーター、シミュレーション方法及びシミュレーションプログラム」
- 特許特許6679645,「シミュレーター、シミュレーション方法および行動決定装置」
- 特許特許6679644,「シミュレーター、シミュレーション方法および行動決定装置」