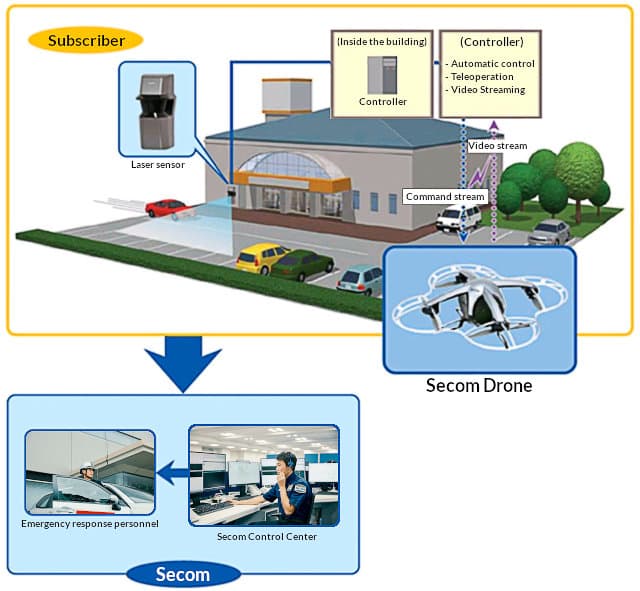
A unique drone application developed by researchers at ISL is the SECOM Drone, an autonomous crime prevention drone, which was announced in 2012 and began use in commercial services starting in 2015.
In large campuses or facilities covering a large area, a significant number of security cameras are required to provide coverage over the entire area, and even then, clearly capturing details of trespassers is difficult. By situating a drone on-site, a quick response to any type of alarm on-site is possible. To accomplish this, SECOM Drone incorporates many different technologies developed at ISL.
SECOM Drone operates in conjunction with a laser sensor (lidar) for emergency response.
When the on-site laser sensor detects an intrusion, the location is transmitted to the drone while off-site emergency response personnel are simultaneously notified. The drone then immediately takes off, rushes to the intruding vehicle or person, captures features such as the vehicle number and color, vehicle type, person's face and appearance, and sends it to the SECOM Control Center. At the control center, the information transmitted by SECOM Drone allows dispatchers to provide additional commands to the response officer or to notify emergency services, as necessary.
SECOM Drone maintains a three-dimensional map of the subscriber site. This map is partitioned into multiple areas such as no-fly and free, which designate whether areas contain obstacles
The drone will not only plans the shortest route to the area of interest, but also dynamically detects and avoids obstacles, and can maintain a fixed distance to moving objects to better capture object features. Safety-wise, it is imperative to stay within the flight area. 3D maps, sensor fusion for localization, and flight control are all technologies developed at ISL.